伺服电动缸与伺服电机,精密驱动的核心动力组合
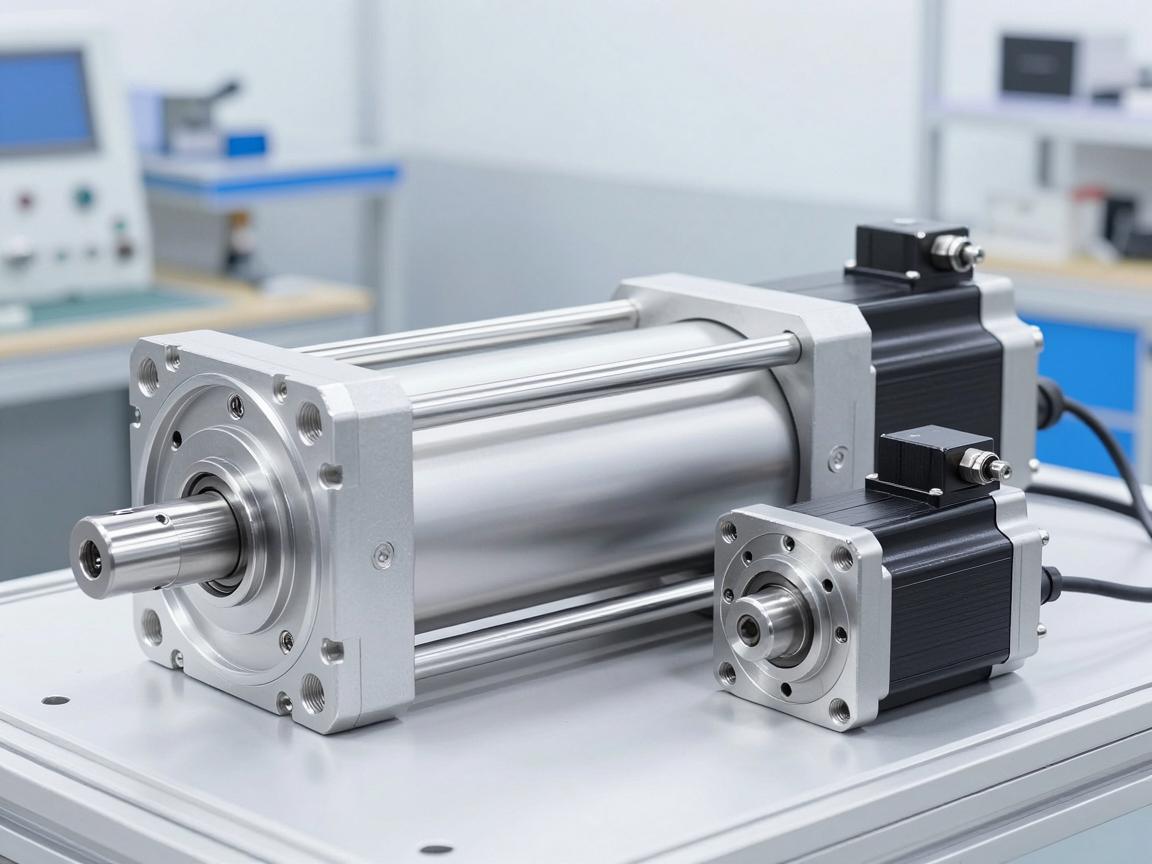
伺服电动缸与伺服电机组成精密驱动的核心动力组合,伺服电机提供高精度、高响应速度的旋转动力,通过内置编码器实现闭环控制,确保位置、速度和力矩的精准输出,电动缸则将电机的旋转运动转化为直线运动,凭借滚珠丝杠或行星滚子丝杠结构,实现低摩擦、高刚性及长寿命的线性推进,两者结合,可达到微米级定位精度与高动态响应能力,广泛应用于工业自动化、机器人、航空航天及医疗器械等对运动控制要求严苛的领域,成为现代精准驱动系统的关键技术方案。
在现代工业自动化领域,精准控制与高效执行已成为衡量设备性能的关键指标,伺服电动缸作为一种精密直线运动执行机构,其核心动力来源——伺服电机,正凭借卓越的响应速度、定位精度和可控性,成为驱动技术革新的重要推动力,本文将深入探讨伺服电动缸与伺服电机的协同工作原理、技术优势及典型应用场景。
伺服电动缸是一种将伺服电机的旋转运动转化为直线运动的精密执行单元,与传统液压或气动缸相比,它省去了复杂的液压站、管路或气源设备,仅需电力驱动即可实现精准的推力与位置控制,其内部结构通常包括:伺服电机、精密丝杠(如滚珠丝杠或行星滚珠丝杠)、导向机构、推杆及编码器。
伺服电动缸的突出优势在于:
- 高精度定位:配合伺服电机的闭环控制,重复定位精度可达±0.01mm以内;
- 多段控制能力:可实现速度、位置、推力等多模式复合控制;
- 高响应速度:加减速过程平稳,动态响应时间可达毫秒级;
- 维护简便:无油液泄漏风险,使用寿命长,适用于洁净环境。
伺服电机:驱动系统的“智能心脏”
伺服电机是伺服电动缸的动力核心,其性能直接决定了电动缸的整体表现,现代伺服电机多采用永磁同步电机(PMSM)或交流伺服电机,配合高分辨率编码器与专用驱动器,构成闭环控制系统。
- 宽调速范围:从低速平稳运转到高速运行均可胜任;
- 高过载能力:短时过载可达额定扭矩的3倍,满足启动与冲击负载需求;
- 低惯量设计:转子转动惯量低,加速与减速响应极快;
- 绝对式/增量式编码器反馈:实时监控转子位置,实现精确换相与速度调节。
协同工作机制:闭环控制实现精确运动
伺服电动缸的工作原理可概括为:伺服电机接收驱动器指令,旋转一定角度,通过丝杠螺母副将旋转运动转化为推杆的直线运动,编码器实时反馈推杆的实际位置、速度与推力信息,驱动器根据偏差信号持续调整电机的输出扭矩与转速,形成闭环控制。
这一机制使得伺服电动缸能够实现:
- 位置模式:精确到达指定位置,如自动化装配中的定位夹紧;
- 速度模式:恒定速度直线运动,如物料输送;
- 推力模式:恒定压力输出,如压装过程中的力控制。
典型应用场景
工业自动化装配
在精密零件压装、轴承安装等工序中,伺服电动缸可精确控制压入力与行程,避免过压或欠压,有效提升产品良品率。
汽车制造
在焊装线、涂装线的定位工装以及发动机测试台的运动控制中,伺服电动缸凭借其高动态响应与低维护性,正逐步替代传统液压系统。
机器人辅助关节
在协作机器人或外骨骼机器人的驱动系统中,小型伺服电动缸配合伺服电机,可实现轻量化、低噪音的关节驱动。
医疗设备
在CT扫描床、手术机器人、康复训练设备中,伺服电动缸的平稳运动与静音特性,确保了患者的舒适度与操作的精准度。
选型与匹配要点
在选择伺服电动缸与伺服电机组合时,需综合考虑以下因素:
- 负载参数:推力、速度、行程、加速度等需求;
- 工作循环:连续工作还是间歇工作,是否需频繁启停;
- 环境因素:温度、湿度、粉尘等级、是否需要IP防护;
- 控制接口:是否支持EtherCAT、CANopen、脉冲指令等通信方式;
- 编码器类型:增量式适用于短距离移动,绝对式适用于多工位或多轴联动。
未来发展趋势
随着工业4.0与智能制造的发展,伺服电动缸与伺服电机的结合将向更智能、更紧凑、更节能的方向演进:
- 集成化:电机、驱动器、编码器与电动缸一体化设计,减少接线与空间占用;
- 直驱技术:采用直线电机替代丝杠传动,消除回程间隙,实现更高线性度;
- 数字孪生:基于实时数据构建电动缸的运动模型,实现预测性维护与故障诊断。
伺服电动缸与伺服电机,一个负责精确执行,一个提供智能动力,二者配合构成了现代精密驱动的理想方案,从简单的定位到复杂的力位复合控制,这一组合正助推各类制造设备向更高效、更智能的方向迈进,对于工程师而言,深入理解其工作原理并合理选型,是实现自动化系统性能优化的重要一步。
如需咨询或购买伺服电动缸,请联系:孙辉,电话:17512080936