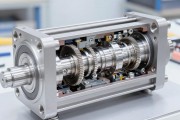
深入解析伺服电动缸内部结构,精密传动与控制的核心奥秘
伺服电动缸的核心结构由伺服电机、滚珠丝杠、齿轮传动系统、缸体及传感器等部件构成,其精密传动原理在于将伺服电机的旋转运动,通过齿轮或同步带高效传递至滚珠丝杠,由丝杠螺母转化为直线运动,实现高精度位移,控制的核心则依赖伺服驱动器与编码器形成闭环反馈,实时监测位置、速度与力矩,确保响应快速、定位精准,内部的高刚性支撑轴承与密封结构保障了长期运行的稳定性与负载能力,通过对这些组件的协同优化,伺服电动缸在工业自动化中实现了高效、可控的直线运动,成为现代精密传动与控制的关键执行元件。

随着工业自动化向高精度、高速度、高柔性化方向持续演进,伺服电动缸凭借其卓越的控制性能、紧凑的结构设计以及绿色节能的显著优势,正逐步取代传统的气缸与液压缸,成为智能制造装备中不可或缺的核心执行元件,要想真正理解伺服电动缸为何能够实现“指哪打哪”的精准运动,就必须深入其内部,探究其精密的结构组成与协同工作原理,本文将从多个维度全面拆解伺服电动缸的内部结构,揭示其高效、精准运行背后的技术细节。
整体架构:从“旋转”到“直线”的精密转换
伺服电动缸本质上是一套将伺服电机的旋转运动转化为直线往复运动的机电一体化装置,从宏观结构来看,其内部核心模块可归纳为三大系统:动力模块、传动模块与支撑/导向模块,三者紧密配合,缺一不可,共同构成了伺服电动缸高效运行的基础。
核心部件逐层拆解
伺服电机:动力之源
伺服电动缸的动力来源于一台高性能的伺服电机,与普通电机不同,伺服电机内置高分辨率编码器,能够实时反馈转子的位置、速度与扭矩信息,电机的高动态响应能力是电动缸实现快速启停、精确位置控制的关键,电机通常通过联轴器或直连方式与丝杠连接,其中直连结构(即无间隙连接)由于消除了传动间隙,成为高精度应用场景中更为理想的设计选择。
传动机构:丝杠与螺母的精密配合
传动机构是伺服电动缸实现旋转运动向直线运动转换的核心部件,也是决定其精度、负载能力与使用寿命的关键单元。
-
滚珠丝杠:这是目前最常见的传动形式,丝杠轴上加工有螺旋滚道,螺母内部则装有循环滚珠,当丝杠旋转时,滚珠在滚道内滚动,带动螺母做直线运动,由于滚动摩擦替代了滑动摩擦,传动效率可高达90%以上,且磨损小、寿命长,高精度等级(如C3、C5级)的滚珠丝杠能够保证微米级的定位精度,满足绝大多数高精度应用需求。
-
行星滚柱丝杠:在重载或高速工况下,滚珠丝杠可能面临承载极限的挑战,此时行星滚柱丝杠便展现出显著优势,其内部以多个螺纹滚柱替代滚珠,实现了线接触而非点接触,从而大幅提升了承载能力、刚性和抗冲击性能,使用寿命也比滚珠丝杠长数倍,特别适用于伺服压机、重型机械等场景。
-
梯形丝杠(少用):在低精度、低速度、低成本场合偶有使用,但因摩擦大、效率低,在高性能伺服电动缸中已基本被淘汰。
无论采用哪种丝杠形式,其与螺母之间的预紧设计都至关重要,合适的预紧可以有效消除反向间隙,确保在换向时依然保持高重复定位精度,这对于精密控制尤为重要。
导向机构:确保运动直线性与刚性
丝杠螺母负责驱动,但直线运动的稳定性需要导向机构来保障,常见的内部导向方式包括:
-
导轨滑块:安装在缸体两侧,与滑块配合,滑块通过连接板与螺母座相连,在丝杠带动下沿导轨线性运动,导轨能够提供极高的承载能力和抗扭矩性能,适合重载或侧向力较大的工况。
-
导向键或花键:对于紧凑型或微型电动缸,常采用内置键槽或花键结构限制螺母的旋转,使其只能沿轴向滑动,这种方式结构更为简练,但承载能力和稳定性相对不如导轨。
-
内置轴承支撑:丝杠两端通常由轴承座支撑,固定端(靠近电机侧)使用成对角接触轴承,以承受轴向推力和径向力;支撑端(远端)则使用深沟球轴承,允许丝杠受热伸长时产生微量位移,防止热变形影响精度。
支撑与连接部件:缸筒、活塞杆与密封系统
-
缸筒:通常采用高强度铝合金或不锈钢拉制而成,既是外壳,也作为导向系统的安装基体,其内表面经过精密加工,确保导轨的平行度与平面度,从而保证运动的稳定性。
-
活塞杆(推杆):直接与螺母座连接,伸出缸外连接负载,材质多为高硬度合金钢,表面经镀铬、淬火等处理,既耐磨又耐腐蚀,在高速应用场景中,活塞杆需要达到很高的表面光洁度,以降低摩擦并延长使用寿命。
-
密封与防尘系统:为了适应粉尘、潮湿等恶劣环境,电动缸通常在活塞杆伸出处安装防尘密封圈(如Y型圈、刮尘器),并在缸体两端安装导向密封件,丝杠内部一般会填充特种润滑脂,部分高端设计还会集成润滑油路或采用迷宫密封结构,防止润滑脂外泄及污染物进入,确保长期稳定运行。
传感器与反馈系统:闭环控制的“眼睛”
伺服电动缸之所以能实现高精度控制,离不开内置或外置传感器的精准反馈。
-
编码器:位于电机后部,检测电机转子的角位置与速度,是控制闭环的基础,能够实现电机级的半闭环控制。
-
直线光栅尺/磁栅尺:在要求极高运动精度(亚微米级)的场合,会在活塞杆或缸体侧面安装直线位移传感器,直接测量推杆的实际位置,从而消除丝杠本身的制造误差、热变形及传动间隙,实现全闭环控制,定位精度可达±1μm甚至更高。
-
力传感器:部分电动缸集成有拉压力传感器,支持力位混合控制,对压装、装配等需要精确控制力的工艺极为关键,可有效提升产品质量与工艺一致性。
各部件的协同工作:从指令到动作
当控制器发出运动指令后,整个系统便进入高度协同的工作流程:
- 伺服驱动器将指令信号转化为电流,驱动伺服电机按指定方向和速度旋转。
- 电机轴通过联轴器或直连方式带动丝杠旋转。
- 丝杠的旋转迫使螺母沿轴向作直线运动。
- 螺母带动活塞杆,同时活塞杆在导轨的约束下做精准的直线位移。
- 编码器实时反馈电机角度,控制器据此调整驱动信号,确保速度与位置持续跟随目标值。
- 光栅尺(若有)则直接反馈推杆位置,消除丝杠间隙带来的误差,形成高精度全闭环控制,实现微米甚至亚微米级的定位精度。
不同应用场景下的结构差异
- 高精度点胶/电子装配:采用精密滚珠丝杠+直线导轨+绝对式光栅尺,结构紧凑,定位精度可达±1μm,满足电子行业对高精度、高一致性的严苛要求。
- 伺服压机:采用高刚度行星滚柱丝杠+力传感器,缸体厚实,确保重载下的刚性,并实现精准的力控与位置控制,适用于压装、铆接等工艺。
- 高速搬运/振动台:采用空心电机+中空丝杠,降低转动惯量;同时使用低摩擦密封结构,实现高频往复运动,满足高速搬运与振动测试的需求。
伺服电动缸看似是一个简单的直线运动装置,但其内部却集成了精密机械设计、伺服控制、传感检测与材料科学等多领域技术,从伺服电机的动力输出,到丝杠螺母的精密转换,再到导轨的稳定导向与反馈系统的精准闭环,每一个环节都经过精心设计与优化,正是这些复杂的内部结构协同工作,才让伺服电动缸在智能制造时代扮演着越来越重要的角色,随着直驱技术、智能传感与网络化控制的深入融合,伺服电动缸的内部结构将更加集成、高效,进一步推动工业自动化的边界不断拓展。
咨询和购买伺服电动缸请联系:孙辉 17512080936